Iteration 3: Propulsion
Contents
Iteration 3: Propulsion#
from unyt import km, m, mm, inch, g, kg, hr, minute, s, degree, radian, volt
import numpy as np
from matplotlib import pyplot as plt
from math import pi as π
%matplotlib inline
rpm = minute**-1
ρ = 1.225*kg/m**3 # air density
μinf = 1.81e-5*kg/(m*s) # viscosity of air
Goals:
Use more accurate weight estimate
Increase the AR a little (13 or something)
Decrease air speed
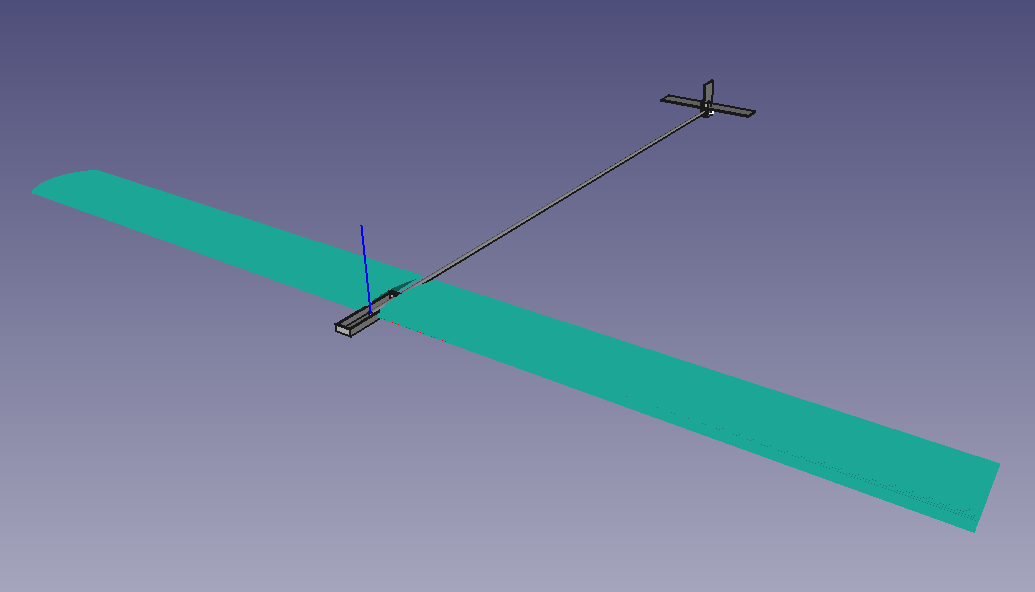
Initial Design#
Increased wingspan from 2850 to 3050.
b = 3050*mm # wingspan
c = 230*mm # chord
S = b*c # wing area
AR = b**2/S
AR
unyt_quantity(13.26086957, '(dimensionless)')
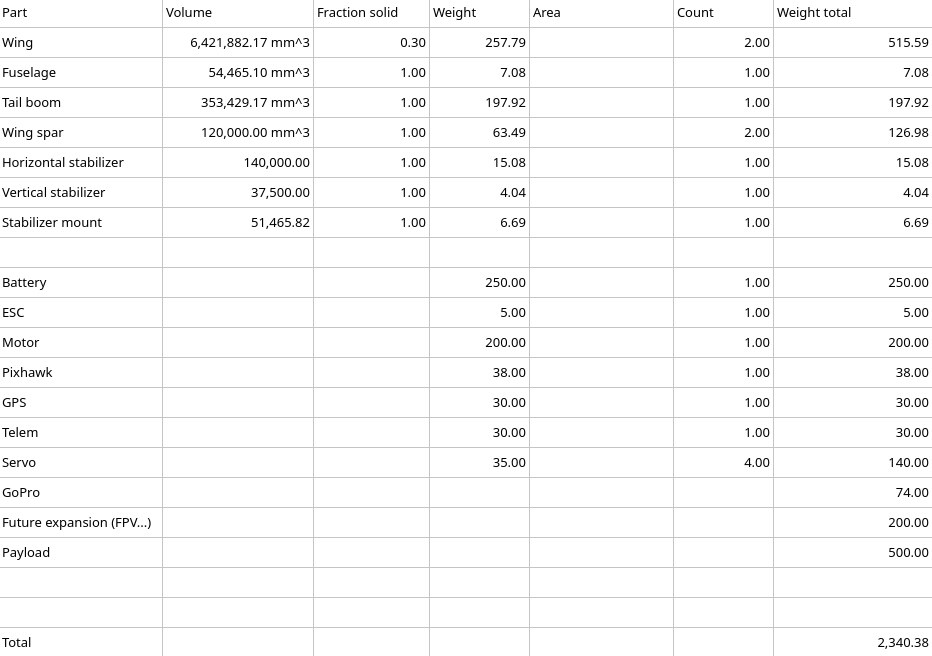
Weight Estimate#
Weight stimate lowered from 3700 to 2340.
W = 2340*g # weight
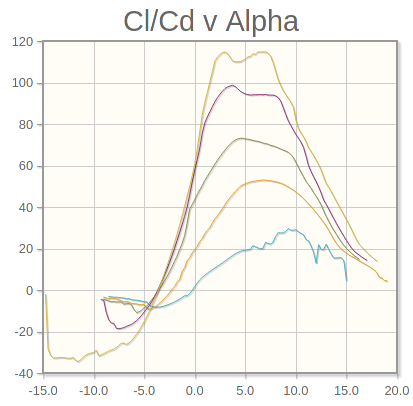
Airfoil Selection#
Cruise speed lowered from 45 to 30.
V = 30*km/hr # cruise speed
CL = (2*W)/(ρ*V**2*S)
Re = (ρ*V*c)/μinf
round(Re.to_value(), -3)
130000.0
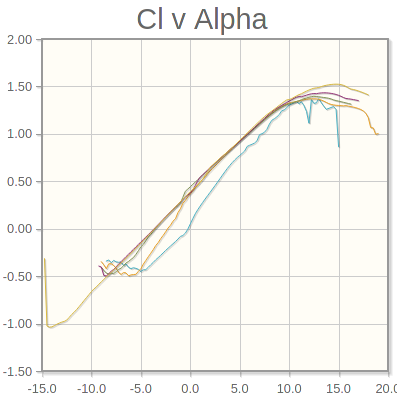
From bottom left up: Blue = 50,000 Orange = 100,000 Green = 200,000
α0 = -3.75*degree
Clα = 1.05
e = 0.8
CLα = Clα/(1+(Clα/(π*e*AR)))
CL_unitless = CL.to_value('s**2/m')
α = α0+((CL_unitless/CLα)*radian)
α
unyt_quantity(0.66417137, 'degree')
The 0.1° α is better than -0.4, but still not great. I do think I may be understimating the weight and probably overestimating the wing’s 3D efficiency (currently 80%). I’ll maybe come back to this.
CLmax = 1.4*s**2/m
Vstall = np.sqrt((2*W)/(ρ*S*CLmax))
print(f"Cruise speed: {V.to('m/s'):.2f}, Stall speed: {Vstall:.2f}")
Cruise speed: 8.33 m/s, Stall speed: 1.97 m/s
Excellent! I feel like I’m doing something wrong because these results are way too comfortable.
Wing Loading and Thrust to Weight Ratio#
WCL = W/(S**(3/2))
print(f"Wing loading: {WCL.to('kg/m**3'):.2f}")
Wing loading: 3.98 kg/m**3
Carlos Montalvo’s WCL ballpark table converted from oz/ft^3 to SI units.
Type of Aircraft |
WCL (kg/m^3) |
|---|---|
Gliders |
under 4 |
Trainers |
5-7 |
Sport Aerobatic |
8-10 |
Racers |
11-13 |
Scale |
over 15 |
Ok so oz/ft^3 -> kg/m^3 is apparently nearly 1:1 for these values.
Anyway, our 3.98 is OK.
TtoW = 1.1
As per ‘Aircraft Flight Mechanics’: T/W should be above 0.8 in all situations and above 1.2 to be safe with short runways. I did find other resources indicating a sub-.8 T/W is OK for gliders. However, it seems universally accepted that 1+ is necessary for 3D flight.
Because I do have future plans for high thrust takeoff with this design, I picked the above.
T = TtoW*W
print(f"{T.to('kg'):.2f}")
2.57 kg
Propulsion system#
To choose a propulsion system we’ll start by calculating the max speed we need to be able to reach.
Assuming we want cruise speed to be 65% throttle:
Vmax = V/0.65
print(f"Max speed: {Vmax.to('m/s'):.2f}")
Max speed: 12.82 m/s
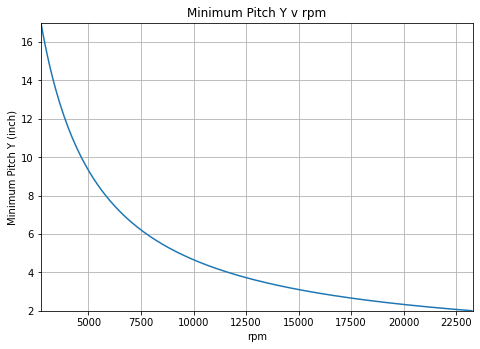
We can then plot the minimum propeller Pitch Y v rpm. (assuming a Pitch Y efficiency of .8.)
pitchYe = 0.65
minPitchYPerMinute = (Vmax*(1/pitchYe)).to('inch/min')
minPitchY, maxPitchY = 2*inch, 17*inch
minRpm, maxRpm = minPitchYPerMinute/maxPitchY, minPitchYPerMinute/minPitchY
x = np.arange(minRpm, maxRpm, 100*rpm)
y = minPitchYPerMinute/x
fig = plt.figure()
ax = fig.add_axes([0, 0, 1, 1])
ax.grid(True)
ax.set_ylim([minPitchY, maxPitchY])
ax.set_xlim([minRpm, maxRpm])
ax.plot(x, y)
ax.set_title('Minimum Pitch Y v rpm')
ax.set_xlabel('rpm')
ax.set_ylabel('Minimum Pitch Y (inch)')
Text(0, 0.5, 'Minimum Pitch Y (inch)')
Or more usefully: the minimum Pitch Y versus the Kv rating for different LiPo cell compositions.
I also ran MotoCalc. You can find the results (and parameters I used) in iteration_3-motocalc-results.txt (and the project in iteration_3-motocalc-project.txt).
The top 4 recommendations are the following (also plotted below):
Kv |
Cell Composition |
Pitch Y |
|---|---|---|
325 |
5S |
7 |
480 |
4S |
6 |
330 |
6S |
7 |
250 |
5S |
11 |
LiPo4SVoltage = 3.7*volt*4
LiPo5SVoltage = 3.7*volt*5
LiPo6SVoltage = 3.7*volt*6
LiPo7SVoltage = 3.7*volt*7
minKv, maxKv = minPitchYPerMinute/(maxPitchY*LiPo7SVoltage), minPitchYPerMinute/(minPitchY*LiPo7SVoltage)+200*(rpm/volt)
x = np.arange(minKv, maxKv, 5*(rpm/volt))
y4S = minPitchYPerMinute/(x*LiPo4SVoltage)
y5S = minPitchYPerMinute/(x*LiPo5SVoltage)
y6S = minPitchYPerMinute/(x*LiPo6SVoltage)
y7S = minPitchYPerMinute/(x*LiPo7SVoltage)
fig = plt.figure()
ax = fig.add_axes([0, 0, 1, 1])
ax.grid(True)
ax.set_ylim([minPitchY, maxPitchY])
ax.set_xlim([minKv, maxKv])
ax.plot(x, y4S, label = "4S")
ax.plot(x, y5S, label = "5S")
ax.plot(x, y6S, label = "6S")
ax.plot(x, y7S, label = "7S")
plt.plot([325], [7], marker='o', label = "325/5S/7")
plt.plot([480], [6], marker='o', label = "480/4S/6")
plt.plot([330], [7], marker='o', label = "330/6S/7")
plt.plot([250], [11], marker='o', label = "250/5S/11")
ax.set_title('Minimum Pitch Y v Kv')
ax.set_xlabel('Kv rating (rpm/volt)')
ax.set_ylabel('Minimum Pitch Y (inch)')
ax.legend()
<matplotlib.legend.Legend at 0x7f54e539a880>
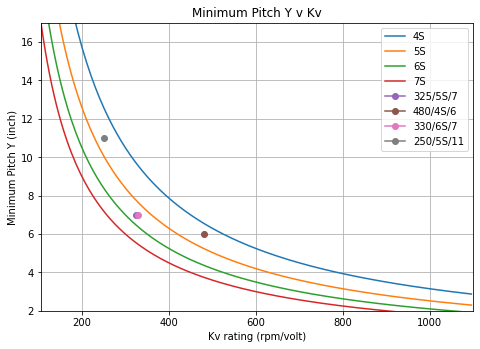
In conculsion: I’m aiming for a minimum 250/4S/12, 300/4S/8, 450/4S/6 but preferably 5 or 6S.
As for prop diameter: any combination of the above that gives me at least 2.6 kg of thrust.
Propulsion system component selection#
Possible combinations:
1. Turnigy G60 Brushless Outrunner 500kv (.60 Glow)#
https://hobbyking.com/en_us/turnigy-g60-brushless-outrunner-500kv-60-glow.html
Kv: 500
Max current: 65A
Price: €57.41
Weight: 360g
5S LiPo (9250 rpm) + 13x8 prop: 869W 47A 2.85kg
Conclusion: OK
2. PROPDRIVE v2 5060 380KV Brushless Outrunner Motor#
https://hobbyking.com/en_us/propdrive-v2-5060-380kv-brushless-outrunner-motor.html
Kv: 380
Max current: 90A
Price: €54.71
Weight: 438g
From reviews:
6S LiPo (8436 rpm) + 15x12 prop: 1110W 50A ???kg
thrust probably higher than the G60 (higher wattage)
Conclusion: OK
3. Turnigy G46 Brushless Outrunner 670kv (.46 Glow)#
https://hobbyking.com/en_us/propdrive-v2-5060-380kv-brushless-outrunner-motor.html
Kv: 670
Max current: 40A
Price: €52.19
Weight: 303g
From reviews:
5S LiPo (12395 rpm) + 12x8 prop: 697W 43A 2.9kg
5S LiPo (12395 rpm) + 13x6 prop: 1000W 54A 3.1kg
I don’t quite get how current draw is exceeding the max here…
Conclusion: maybe OK, on the uncomfortable side with regards to the max current rating
4. PROPDRIVE v2 5050 580KV Brushless Outrunner Motor#
https://hobbyking.com/en_us/propdrive-v2-5050-580kv-brushless-outrunner-motor.html
Kv: 580
Max current: 90A
Price: €49.58
Weight: 331g
From reviews:
6-7S? LiPo (14247 rpm) + 14x7 prop: 1298W 69A ???kg
Conclusion: OK
5. PROPDRIVE v2 4258 500KV Brushless Outrunner Motor#
https://hobbyking.com/en_us/propdrive-v2-4258-500kv-brushless-outrunner-motor.html
Kv: 500
Max current: 60A
Price: €46.10
Weight: 300g
4S LiPo ( 7400 rpm) + 15x8 prop: 421W 28.5A ???kg
5S LiPo ( 9250 rpm) + 15x8 prop: 760W 41.1A ???kg
6S LiPo (11100 rpm) + 15x8 prop: 1256W 56.6A ???kg
~~6S LiPo (11100 rpm) + 16x10 prop: 669W 45.2A ???kg~~
4S LiPo ( 7400 rpm) + 16x10 prop: 669W 45.2A ???kg
I used the wrong crossed out rating for the decisions below, so these are not entirely accurate. See iteration 4 for the right version.
Conclusion: OK
6. Turnigy Aerodrive SK3 - 5055-380KV Brushless Outrunner Motor#
https://hobbyking.com/en_us/outrunner-for-1450mm-spitfire-inc-prop-shaft-x-shared-part.html
Kv: 380
Max current: 65A
Price: €42.73
Weight: 422g
Conclusion: maybe OK
Comparing all of the above seems a bit arbitrary, and I still have a lot to learn.
Regardless I’ll be going with #5: the PROPDRIVE v2 4258 500KV Brushless Outrunner Motor (€46.10) with 6S battery and 16x10 prop. It is the second cheapest shippable option, the lightest motor, and while using a larger prop and rpm, it achieves a lower power draw (669v869) than #1 (while likely providing more thrust).
Also, all reviews are positive and PROPDRIVE’s technical specifications seems more complete than Turnigy’s, which does inspire more confidence.
Stability and Control, Center of Mass, Aerodynamic Center and Static Margin#
I won’t be calculating any of the stability paramters right now for two reasons:
I will be 3D printing the fuselage, which means I have a lot of freedom with regards to weight distribution and dihedral.
I don’t have any experience building wings, and to test out some of the weight distribution ideas that I have (like putting batteries in the front section of the wing), I feel like I have to build first.
Final parts selection#
Motor#
As outlined above, this will be the PROPDRIVE v2 4258 500KV Brushless Outrunner Motor (€46.10).
ESC#
Assuming a 10% higher ESC power rating than the 60A max motor current (we’re only planning on 45.2A anyway), we need a 66A ESC.
I decided on the YEP 80A (2~6S) SBEC. It’s well rated, can handle more than enough current, and has a nice 6A@5.5V BEC.
Battery#
Our max power draw is approximately 66A. This means we’re looking for a C rating of at least:
Or double that to be safe, as per https://www.rchelicopterfun.com/lipo-batteries.html#lipo3
3000mAh: 22 (44)
3300mAh: 20 (40)
3700mAh: 18 (36)
4000mAh: 17 (34)
Motocalc recommends a 2100 2P = 4200 pack system to get half an hour of flight time.
I decided to go with the Turnigy nano-tech 4000mAh 6S 35~70C. I was considering going with two lower capacity packs to integrate into the wing, however this would be difficult because the usual minimum thickness of a 6S pack is about 45mm. Also, this pack has a relatively high capacity-to-weight ratio of 6.61mAh/g, which is better than for example the Turnigy Heavy Duty 4000mAh 6S 60C at 5.87mAh/g. I’m noticedI underestimated all power components quite a bit, so the relatively lighter weight will come in handy.
Prop#
The TGS Precision Sport Propeller 17x10 look ok. I’m just now realizing how big 17 inches is. Since I need to do a new iteration with better weight estimates anyway I might also come back to this and try to pick a smaller prop diameter.