Iteration 4: Propulsion Weight
Contents
Iteration 4: Propulsion Weight#
from unyt import km, m, mm, inch, g, kg, hr, minute, s, degree, radian, volt
import numpy as np
from matplotlib import pyplot as plt
from math import pi as π
%matplotlib inline
rpm = minute**-1
ρ = 1.225*kg/m**3 # air density
μinf = 1.81e-5*kg/(m*s) # viscosity of air
Goals:
Use more accurate weight estimate with new power system components
Initial Design#
b = 3050*mm # wingspan
c = 230*mm # chord
S = b*c # wing area
AR = b**2/S
AR
unyt_quantity(13.26086957, '(dimensionless)')
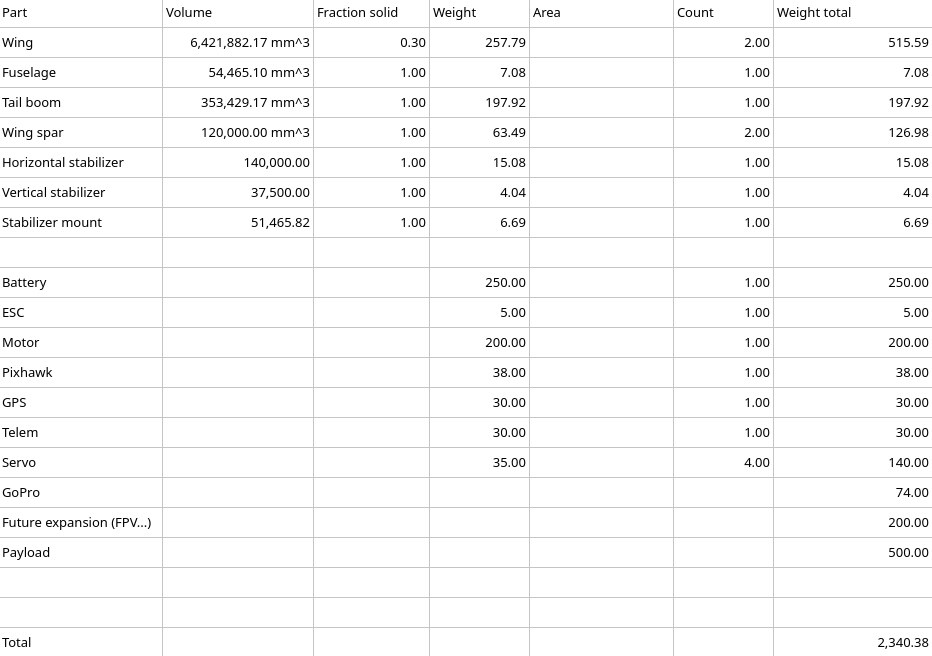
Weight Estimate#
Weight estimate increased from 2340 to 3047 (increased weight of battery, ESC, motor, and future expansion + added prop weight estimate).
W = 3047*g # weight
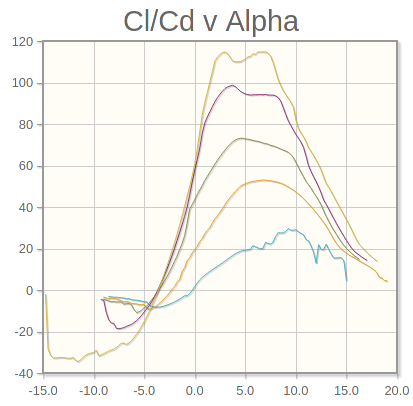
Airfoil Selection#
Cruise speed lowered from 45 to 30.
V = 30*km/hr # cruise speed
CL = (2*W)/(ρ*V**2*S)
Re = (ρ*V*c)/μinf
round(Re.to_value(), -3)
130000.0
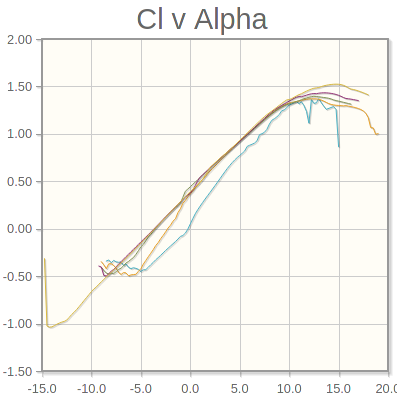
From bottom left up: Blue = 50,000 Orange = 100,000 Green = 200,000
α0 = -3.75*degree
Clα = 1.05
e = 0.8
CLα = Clα/(1+(Clα/(π*e*AR)))
CL_unitless = CL.to_value('s**2/m')
α = α0+((CL_unitless/CLα)*radian)
α
unyt_quantity(1.99785477, 'degree')
By increasing the weight our cruise angle of attack increased to 2° which is a lot closer to the optimal. That’s a nice consequence.
CLmax = 1.4*s**2/m
Vstall = np.sqrt((2*W)/(ρ*S*CLmax))
print(f"Cruise speed: {V.to('m/s'):.2f}, Stall speed: {Vstall:.2f}")
Cruise speed: 8.33 m/s, Stall speed: 2.25 m/s
Worse than the 1.97 m/s of iteration 3 but still OK.
Wing Loading and Thrust to Weight Ratio#
WCL = W/(S**(3/2))
print(f"Wing loading: {WCL.to('kg/m**3'):.2f}")
Wing loading: 5.19 kg/m**3
Type of Aircraft |
WCL (kg/m^3) |
|---|---|
Gliders |
under 4 |
Trainers |
5-7 |
Sport Aerobatic |
8-10 |
Racers |
11-13 |
Scale |
over 15 |
This could probably be a bit lower. Although my eventual vision is more like a glider-with-enough-power-for-autonomous-takeoffs type design, so I guess it’s not surprising I won’t have the most incredible glide slope.
TtoW = 1.1
T = TtoW*W
print(f"Required thrust: {T.to('kg'):.2f}")
Required thrust: 3.35 kg
Propulsion system#
Refer back to iteration 3 for kv and prop pitch Y estimates as we did not change the airspeed, so the required kv ratings and pitch Y estimates stay the same.
Increasing the weight did increase the required thrust from 2.6 to 3.35kg.
Propulsion system component selection#
Looking back at the options I outlined in iteration 3, I couldn’t find anything which can sustain the 3.35kg required thrust. I decided to forgo that requirement. A 16x10 inch prop at full throttle may not be sustainable continuously for the PROPDRIVE v2 4258 500KV, but I think it’ll be fine because:
This would only occur at takeoff
The manufacturer published the 16x10 test results so at least it’s not completely fatal to run it like that
rcplanes.online’s excellent Electric Motor & Prop Combo Estimator indicates the 16x10/500Kv/6S combination should be able to generate 3.5kg of thrust @ 46.7A (below the Propdrive’s 60A max). I probably chose a bunch of paramters wrong, but still, it indicates the current draw will not be completely ludicrous.
In conclusion, I will be keeping the selction I made in iteration 3:
Motor: PROPDRIVE v2 4258 500KV Brushless Outrunner Motor - €46.10
Prop: TGS Precision Sport Propeller 17x10 - €6.14 * 3 = €18.42
ESC: YEP 80A (2~6S) SBEC - €43.49
Battery: Turnigy nano-tech 4000mAh 6S 35~70C - €63.39
Total power system: €171.40