Lakehopper 🐝🏞️
Contents
Lakehopper 🐝🏞️#
Website: lakehopper.pfiers.net
Lakehopper is my long-term project to create a solar-powered autonomous drone that rests on lakes during nights and overcast days. Think of it as a migrating bird that survives off of photosynthesis.
As my Master’s thesis, I developed Lakehopper’s high-level planning software. This system uses a convolutional neural network to identify lakes and buildings from aerial imagery. From this, it generates a navigation graph to calculate the best multi-hop paths between lakes. These paths avoid build-up areas and restricted airspace.
In my free time I’m working on the hardware of the drone. The first
version I developed unfortunately experienced a
crashrapid unscheduled disassembly on its
maiden flight. I’m currently working on the second
version.
High-Level Planning Software#
You can find the training code and data pipeline for Lakehopper’s machine vision model in the vision folder. The planner folder contains the source code for the planner component.
Lakehopper 1#
Read about the design and maiden flight here: Lakehopper 1 Design.

Lakehopper 2#
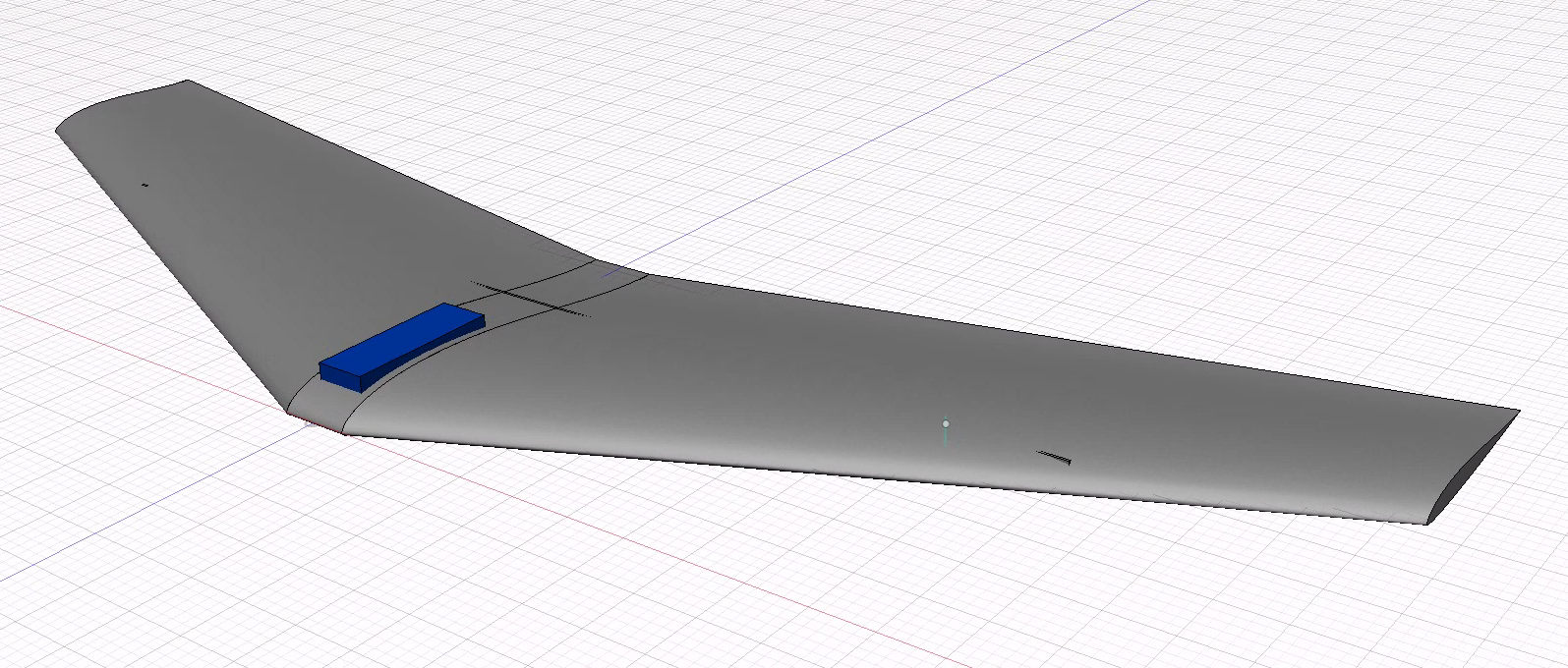
I’m still hard at work on Lakehopper 2’s design and development.
In the meantime, here’s what Lakehopper 2 will probably look like: